Output
- to Tactile or Pain sense
![]()
- to Tactile or Pain sense
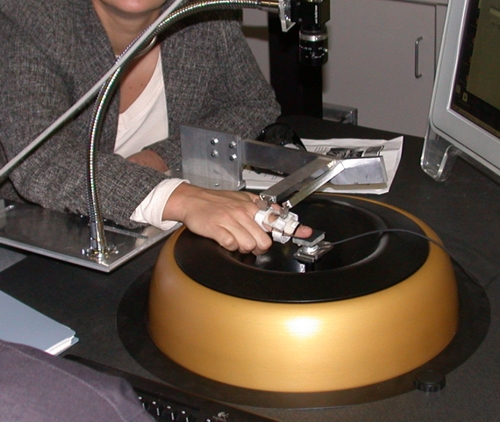
Magnetic Levitation Haptic Interfaces
maglev200
maglev200
Description
At the heart of the maglev haptic interface is a bowl-shaped assembly called a flotor that has six embedded coils of wire. Electric current flowing through the coils interacts with powerful permanent magnets, causing the flotor to levitate. A handle is attached to the flotor. A user moves the handle much like a computer mouse, but in three dimensions with six degrees of freedom – up/down, side to side, back/forth, yaw, pitch, and roll. Optical sensors measure the position and orientation of the flotor, and this information is used to control the position and orientation of a 3D virtual object (Hollis, 2018).
Website(s)
For More Information Contact
Bibliography
Hollis, R. (2008). Maglev haptics: butterfly haptic’s new user interface technology. In ACM SIGGRAPH 2008 new tech demos (pp. 1-1).