Output
- to Tactile or Pain sense
![]()
- to Tactile or Pain sense
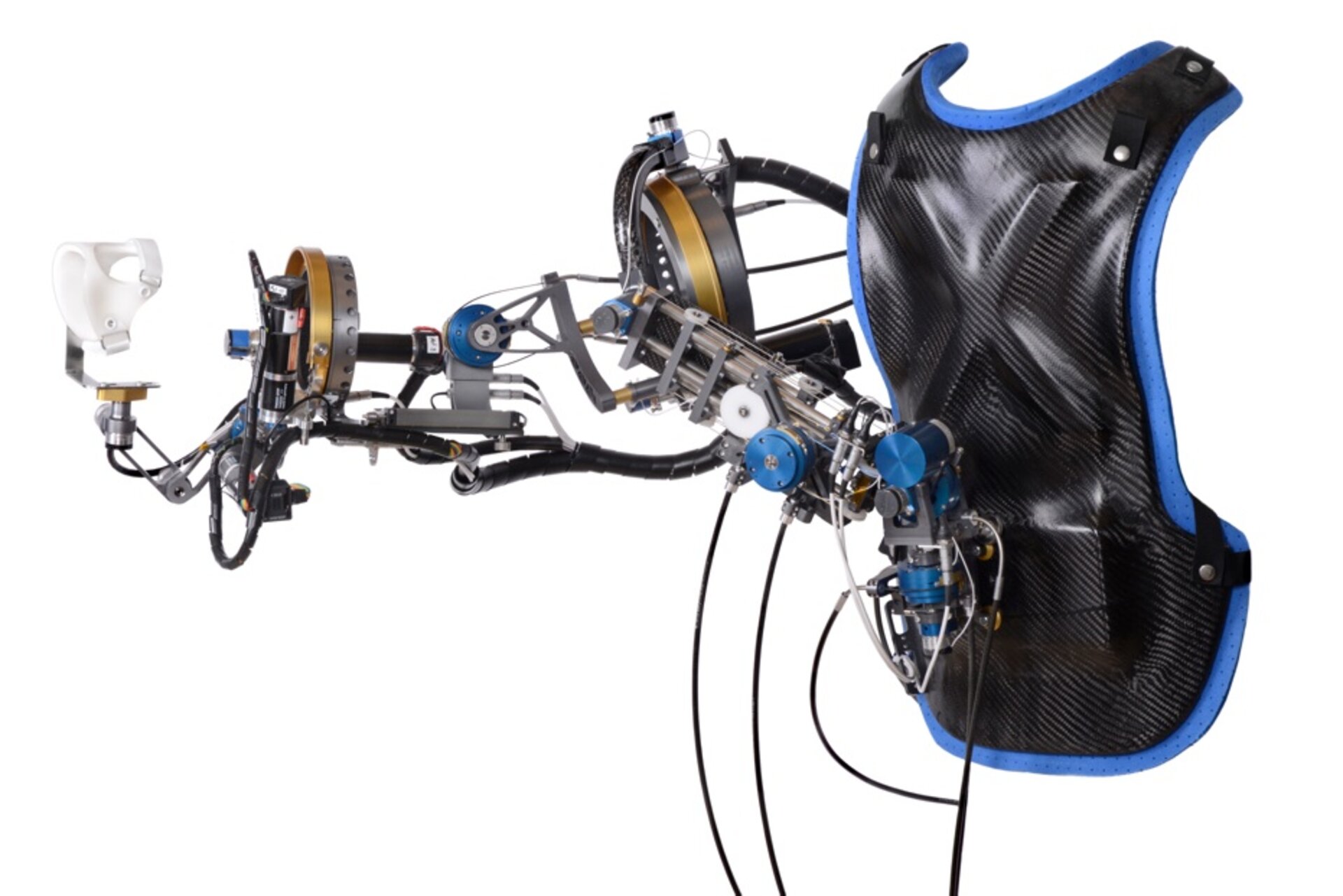
Haptic Exoskeleton
X-Arm-II
X-Arm-II
Description
This powered upper extremity exoskeleton is one of the first to fully be able to interact with the human shoulder-girdle and to provide force-feedback. (Andre et al. 2008).
Website(s)
- European Space Agency’s Telerobotics & Haptics Laboratory
- X-Arm-2 Demo
- Development of the New Ergonomic X-Arm-2 Exoskeleton
For More Information Contact
Bibliography
Schiele, A., & Hirzinger, G. (2011, September). A new generation of ergonomic exoskeletons-the high-performance x-arm-2 for space robotics telepresence. In 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 2158-2165). IEEE.